

















 Skip to content
Skip to content



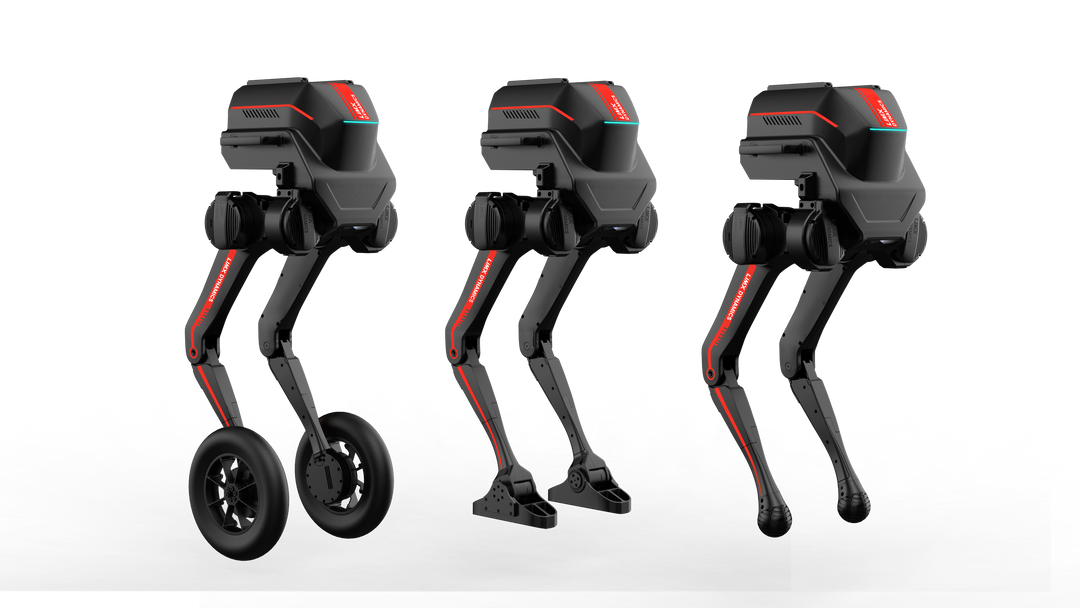
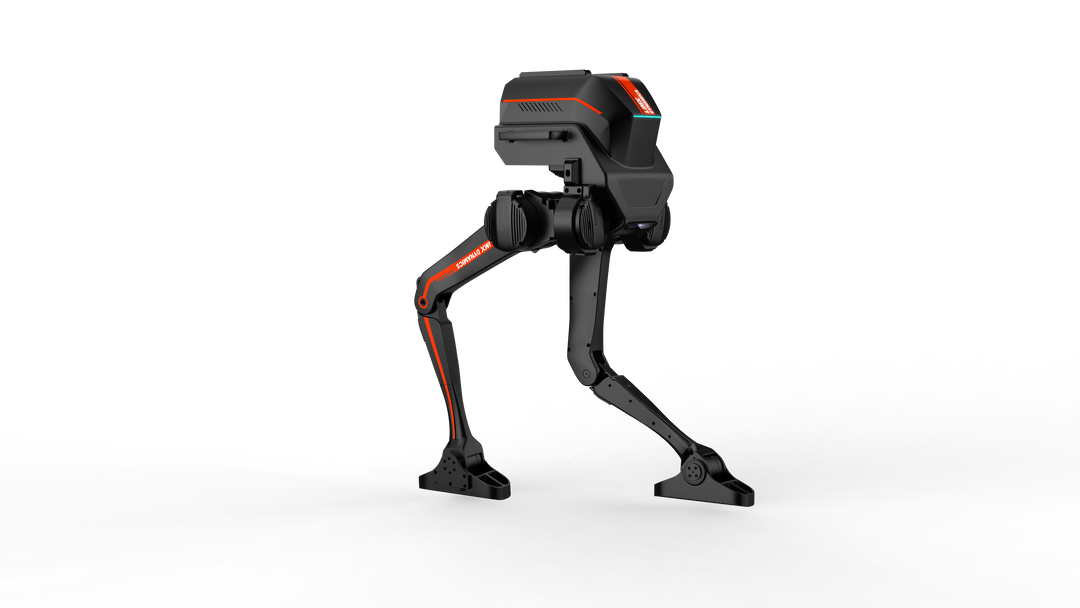
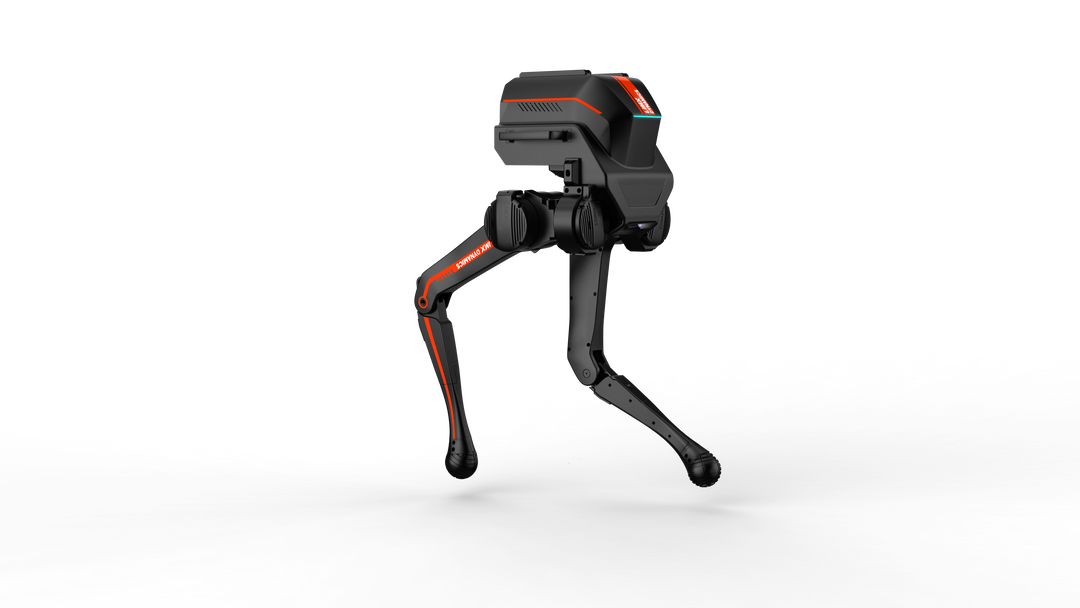
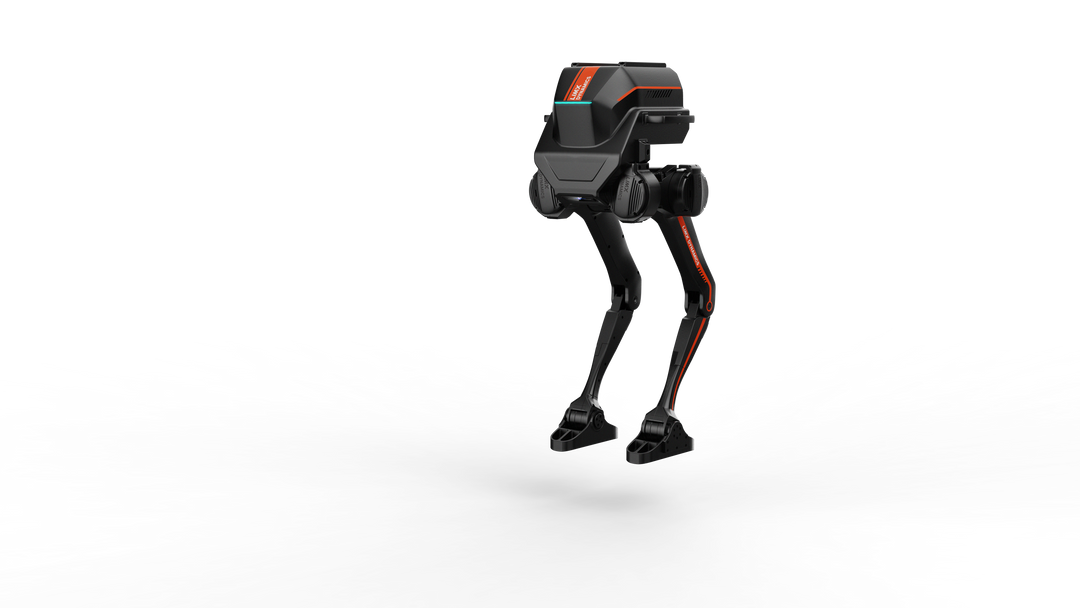
 Discover TRON 1 by LimX Dynamics—the world's first multi-modal biped robot featuring a modular foot-end design for versatile locomotion. Ideal for advancing humanoid reinforcement learning research, TRON 1 offers ready-to-use deployment, quick assembly, and comprehensive development support with an open SDK and Python compatibility.
Discover TRON 1 by LimX Dynamics—the world's first multi-modal biped robot featuring a modular foot-end design for versatile locomotion. Ideal for advancing humanoid reinforcement learning research, TRON 1 offers ready-to-use deployment, quick assembly, and comprehensive development support with an open SDK and Python compatibility.